
Sergio
Picella
I'm a PhD student in the Soft Robotic Matter Group at AMOLF and the Dynamics and Control at TU Eindhoven, with a background in Physics. My research focuses on the control, energy and actuation autonomy of (electronics-free) soft robots.
Published
Pneumatic coding blocks enable programmability of electronics-free fluidic soft robots
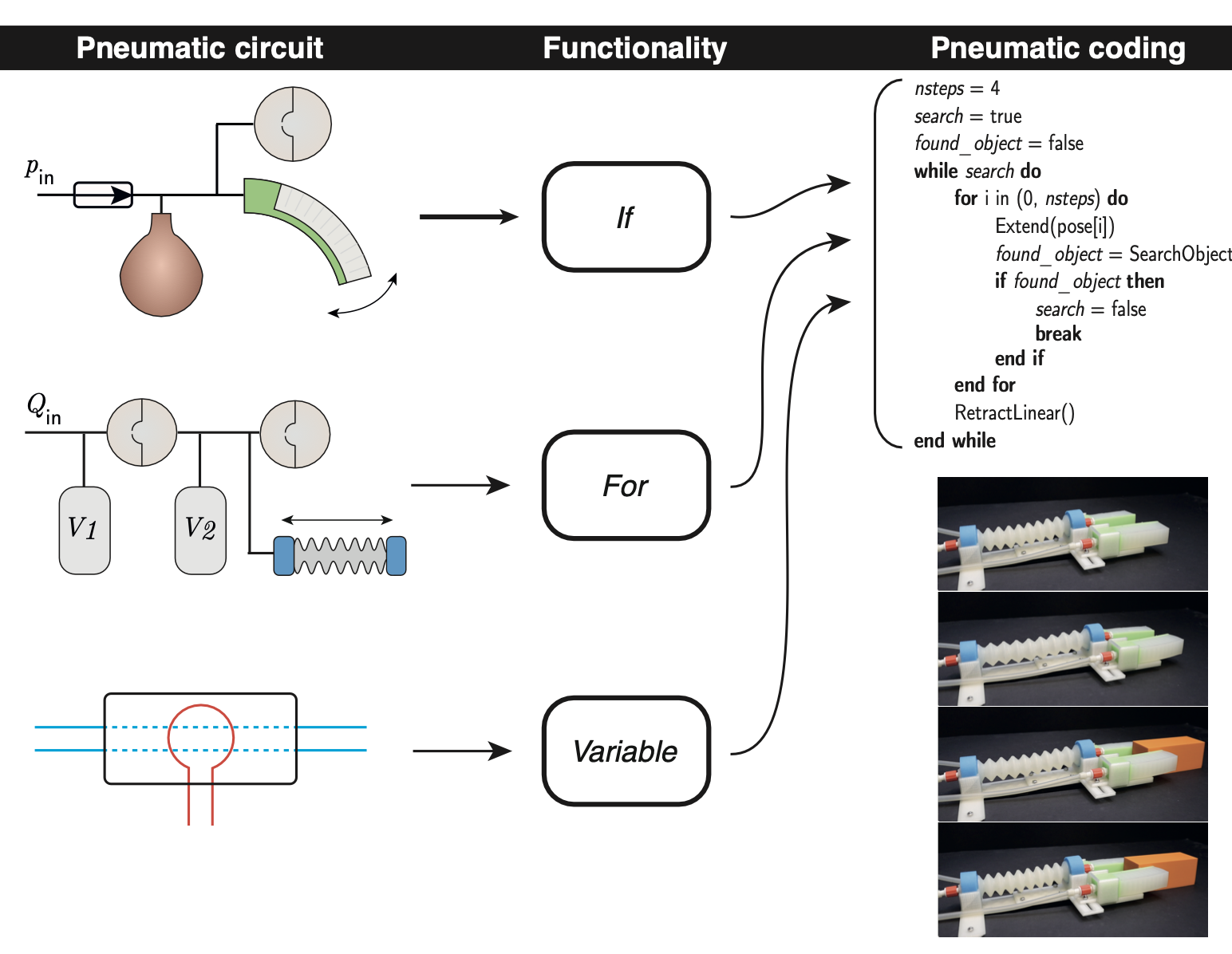
Soft robots, which are flexible and mimic living organisms, often require complex electronics and software to make
decisions based on their environment. We introduce a dictionary of pneumatic coding blocks instead of
electronics to enable high-level, electronics-free coding of programs in fluidic soft robots.
These blocks mimic basic programming commands like If or For and rely on the natural mechanical
properties of materials. By combining these blocks, we created a soft robotic gripper that can switch behaviors based
on its surroundings.
This approach mirrors how living systems encode functions in their bodies, offering a more natural, efficient, and
autonomous way to program soft robots for complex tasks.
[video]
Regulating Airflow Using Hybrid LCN for Soft Pneumatic Circuits

Adaptable fluidic systems are often required to actively respond to environmental cues. In this study, we develop a
liquid crystal network (LCN)–based fluid regulator that provides thermal responsiveness and regulates fluid flow.
We combine radially aligned nematic and nonaligned isotropic LCNs, aided by finite element simulations, to analyze how
temperature variations influence the regulator’s shape change and tunable fluid resistance.
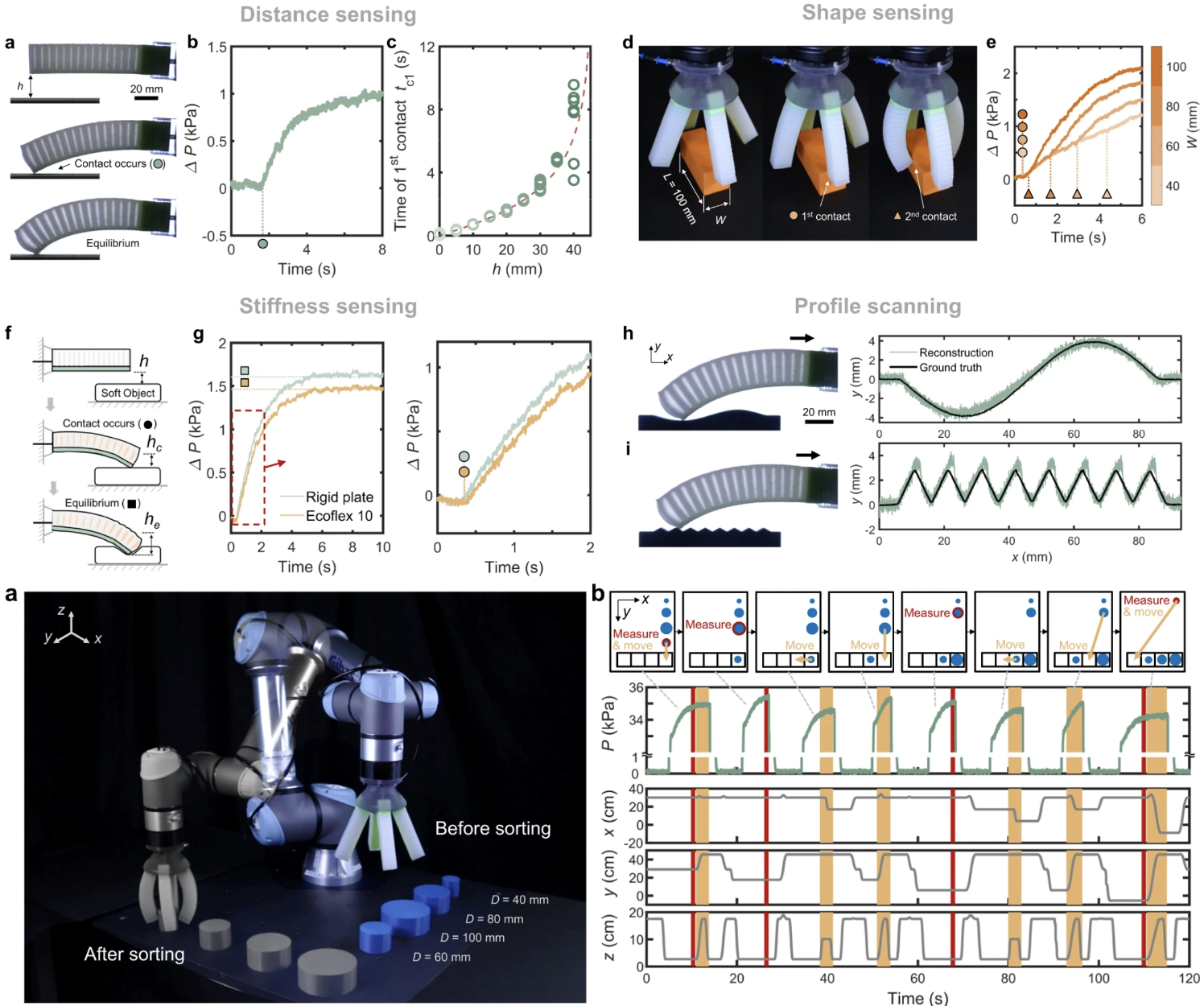
A Retrofit Sensing Strategy for Soft Fluidic Robots
Soft robots can adapt to different environments by changing shape in response to forces, but
sensory feedback is crucial for higher-level decision-making. Current sensing technologies require separate
sensing elements integrated into soft actuators, complicating fabrication and reducing robustness.
We present a versatile sensing strategy that retrofits existing soft fluidic devices without design changes
by measuring the fluidic input needed to activate a soft actuator and linking it to its deformed state. This approach
enables tactile sensing of object size, shape, roughness, and stiffness, and demonstrates robustness in tasks like fruit
sorting and ripeness detection, without requiring embedded sensors or redesign.
[video]
Robust phototaxis by harnessing implicit communication in modular soft robotic systems
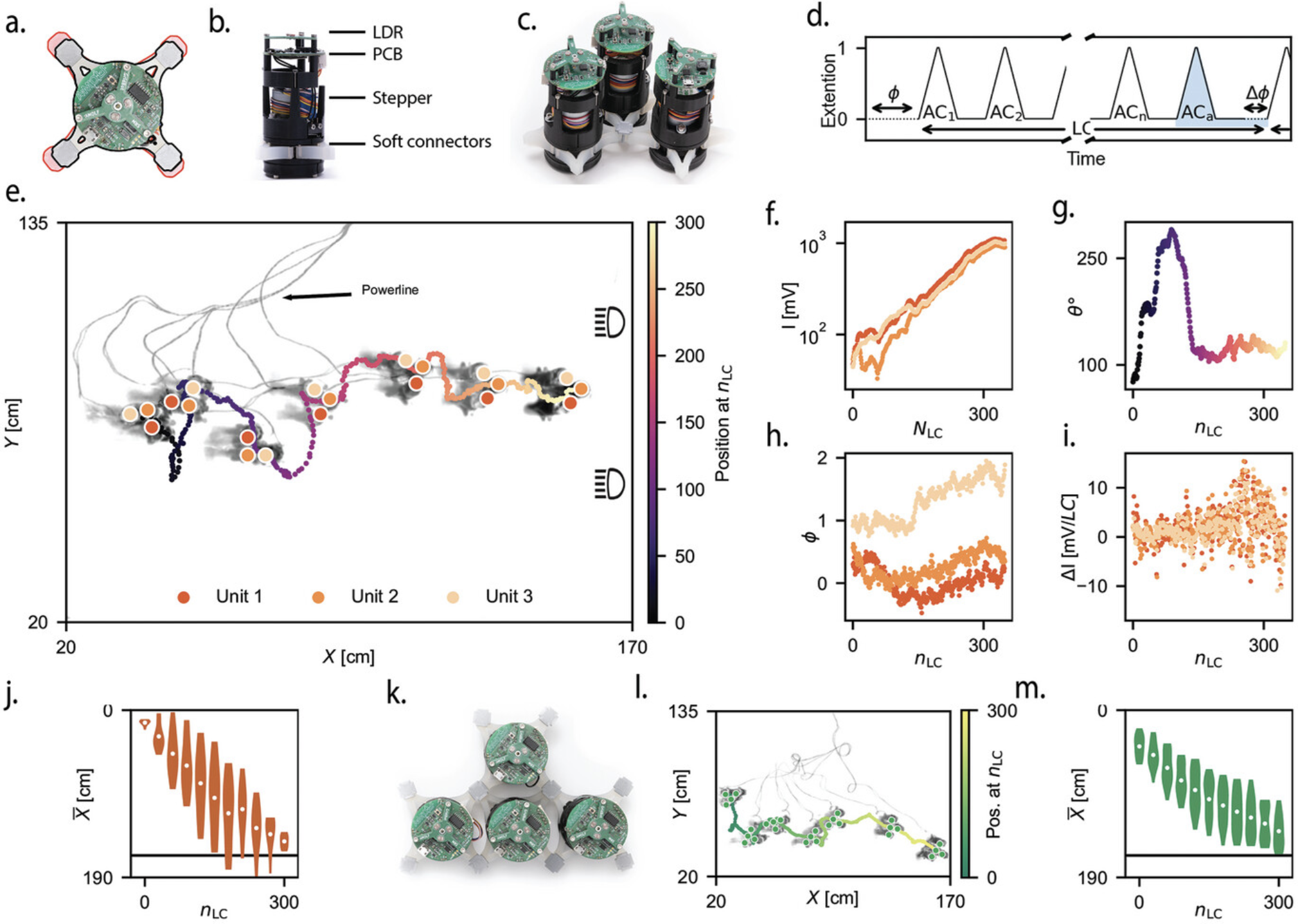
Achieving adaptivity in complex environments is a significant challenge in robotics. Traditional systems rely on stiff
materials and centralized controllers, while nature often employs soft materials and distributed intelligence. Our study
introduces a decentralized approach for robust behavior in soft robotic systems that requires no prior
knowledge of shape or environment.
By implementing simple rules in identical modules, the system achieves whole-body phototaxis—moving toward a light source—
without explicit communication between modules. The results demonstrate robust, adaptive behavior in dynamic
environments, highlighting the importance of system geometry and learning parameters. This approach offers a pathway to
adaptive, autonomous robots requiring minimal computational power.
Submitted [top]
- Harvesting Environmental Circadian Oscillations for Energy Autonomy in Soft Robots, Picella S., Comoretto, A., Vaarkamp, O., Overvelde, J.T.B.
In Preparation [top]
- From Marionettes to Robots: on the Design of Soft Robots, Picella S., Overvelde, J.T.B.
- Explicit and Implicit Coupling: Modelling and Designing Interactions between Oscillators and their Environment, Picella S., Overvelde, J.T.B.
Education [top]
- PhD in Soft Robotic Matter Group @ AMOLF and Dynamics and Control at TU Eindhoven (2021–2025)
- MSc in Experimental Physics (2019–2021) + Complex Systems Profile @ Utrecht University (NL). Thesis: Distributed Learning of Emergent Behaviour in 2D Robotic Matter, Supervisors: prof. dr. ir. Marjolein Dijkstra, dr. Laura Fillon, dr. ir. J.T.B. Overvelde
- BSc in Physics (2013–2017) @ Università degli Studi "Aldo Moro" di Bari (IT). Thesis: Electrolyte Gated Organic Field Effect Transistor: biosensing applications, Supervisor: prof. Gaetano Scamarcio
Demonstrators [top]
-
SOMBRA —
Design, testing and manufacturing of electronics-free actuators for moving façades (Biennale di Architettura, Venice (IT) 2025),
in collaboration with AIRSHADE and
MVRDV


- Soft Robotics Symphony (3rd place @ Arts Exhibit - Robosoft 2025) — video (Lausanne (CH), 2025), in collaboration with van Riet, C. M.
- Electronics-free control, powering and actuation of sustainable, electronics-free shading systems for façade systems (2024–), in collaboration with AIRSHADE
-
Haptic Feedback enabled by proprioperception of pneumatic gripper (2023), in collaboration with Shibo Zou (AMOLF),
Femke van Beek (TU Eindhoven), Ali Sadeghi (University of Twente)


- Robotic Gripper Competition @ RoboSoft 2022 (Edinburgh, GB), in collaboration with Shibo Zou (AMOLF), Jelle de Vries (AMOLF), Niels Commandeur (AMOLF)
Teaching Experience [top]
- Guest Lecture for the MSc course Introduction to Complex Systems @ Utrecht University (2024)
- Teaching Assistant for Advanced Materials for Soft Robotics @ TU Eindhoven (2023–2024)
- Advanced Matter Energy Physics Seminar (AMEP) @ University of Amsterdam (2023)
- 5 Bachelor Thesis supervisions @ TU Eindhoven (2022–2024)
- 2 Master Thesis supervisions @ AMOLF (2023–2024)
Conference Presentations [top]
- Bodyware for autonomous façade systems, (2025), Picella, S., Overvelde, J.T.B., Future Façade, Utrecht, NL.
- Energy Autonomy through thermopneumatic electronics-free bodyware, (2025), Picella, S., Comoretto A., Vaarkamp O. Overvelde, J.T.B., Robosoft 2025, Lausanne, CH.
- Automatic and Autonomous systems, (2025), Picella, S., Overvelde, J.T.B., Robosoft 2025, Lausanne, CH.
- Proficient without training, (2025), Picella, S., Overvelde, J.T.B., Embodied Intelligence 2025, Online Conference.
- From Marionette systems to Autonomous (Soft) Robots, (2024), Picella, S., van Riet, C. M., Comoretto A., Vaarkamp O., Overvelde, J.T.B., Workshop on Interplay of Fluids and Soft Materials, Oslo, Norway. Invited Talk.
- Endowing soft robots with counting capabilities...and more! (2023), Picella, S. van Riet, C. M., Overvelde, J.T.B., APS March Meeting, Las Vegas, US.

- Biosensing through Electrolyte Gated Organic Field Effect Transistors (2018), Picella, S., Scamarcio, G., Italian Physics Society, Rende, Italy.
Poster Presentations
- Thermopneumatic Energy Harvesting through circadian Oscillations (2024), Picella, S., Comoretto A., Vaarkamp, O., Overvelde, J.T.B., PhD Workshop, Leuven, Belgium.

- Enabling High-level programmability in Pneumatic Soft Robots, (2024), Picella, S., van Riet, C. M., Overvelde, J.T.B., GRS/GRC on Physically and Computationally Intelligent Behaviour in Robots, Ventura, US.

- Fluidic Coding for Soft Robots (2024), Picella, S., van Riet, C. M., Overvelde, J.T.B., Dutch Soft Robotic Meeting, Eindhoven, Netherlands.
- Towards emergent behavior in modular soft robots (2022), Picella, S., Overvelde, J.T.B., ICMS Annual Symposium, Eindhoven, Netherlands.
- Control Through Limit Cycles in Out-of-Equilibrium Soft Robots (2021), Picella, S., Overvelde, J.T.B., ICMS Annual Symposium, Eindhoven, Netherlands.
Technical Skills [top]
- Languages: English (L2), French (L2), Italian (L1)
- Coding Languages: Python, C, MATLAB, Mathematica, Javascript, HTML
- Fabrication: Silicone Casting, Mold Design, 3D Printing
Outreach & Extra-Curricular Activities [top]
- Pint of Science Utrecht: Event Manager (2023–2024), Communication (2025)


- AMOLF Open Day (2022–2024)

- Tata Steel team @ Physics with Industry (PWI) (2022)
- Monitoring and classification of shallow water biomes (2021–)
- Vice-president of the Italian Association of Physics Students (2019–2020)

- National Coordinator for local committees for the Italian Association of Physics Students (2018–2020)
- President of the Local Committee of Bari for the Italian Association of Physics Students (2017–2018)
- Organising Committee for the National Meeting of Italian Association of Physics Students (CISF) (2017)
- European Researcher Night: Coordinator of Outreach Activities and Volunteers (2015–2019)

Volunteering [top]
- Language Cafe Utrecht (LCU): Host @ Weekly Language Exchange Event in Utrecht (2020–)



- Italian Language Conversation Tutor (2019–)
- Volunteer on Italian Civil Protection Unit (Protezione Civile) for First Aid Emergency during 2016 Central Italy Earthquake Emergency (October 2016)

- Volunteer on Ambulances for First Aid Emergency (2014–2017)
Get in touch! I'd love to hear from you
